- · 《农业工程技术》栏目设[05/19]
- · 《农业工程技术》收稿方[05/19]
- · 《农业工程技术》投稿方[05/19]
- · 《农业工程技术》征稿要[05/19]
- · 《农业工程技术》刊物宗[05/19]
一、来稿必须是作者独立取得的原创性学术研究成果,来稿的文字复制比(相似度或重复率)必须低于用稿标准,引用部分文字的要在参考文献中注明;署名和作者单位无误,未曾以任何形式用任何文种在国内外公开发表过;未一稿多投。 二、来稿除文中特别加以标注和致谢之外,不侵犯任何版权或损害第三方的任何其他权利。如果20天后未收到本刊的录用通知,可自行处理(双方另有约定的除外)。 三、来稿经审阅通过,编辑部会将修改意见反馈给您,您应在收到通知7天内提交修改稿。作者享有引用和复制该文的权利及著作权法的其它权利。 四、一般来说,4500字(电脑WORD统计,图表另计)以下的文章,不能说清问题,很难保证学术质量,本刊恕不受理。 五、论文格式及要素:标题、作者、工作单位全称(院系处室)、摘要、关键词、正文、注释、参考文献(遵从国家标准:GB\T7714-2005,点击查看参考文献格式示例)、作者简介(100字内)、联系方式(通信地址、邮编、电话、电子信箱)。 六、处理流程:(1) 通过电子邮件将稿件发到我刊唯一投稿信箱(2)我刊初审周期为2-3个工作日,请在投稿3天后查看您的邮箱,收阅我们的审稿回复或用稿通知;若30天内没有收到我们的回复,稿件可自行处理。(3)按用稿通知上的要求办理相关手续后,稿件将进入出版程序。(4) 杂志出刊后,我们会按照您提供的地址免费奉寄样刊。 七、凡向文教资料杂志社投稿者均被视为接受如下声明:(1)稿件必须是作者本人独立完成的,属原创作品(包括翻译),杜绝抄袭行为,严禁学术腐败现象,严格学术不端检测,如发现系抄袭作品并由此引起的一切责任均由作者本人承担,本刊不承担任何民事连带责任。(2)本刊发表的所有文章,除另有说明外,只代表作者本人的观点,不代表本刊观点。由此引发的任何纠纷和争议本刊不受任何牵连。(3)本刊拥有自主编辑权,但仅限于不违背作者原意的技术性调整。如必须进行重大改动的,编辑部有义务告知作者,或由作者授权编辑修改,或提出意见由作者自己修改。(4)作品在《文教资料》发表后,作者同意其电子版同时发布在文教资料杂志社官方网上。(5)作者同意将其拥有的对其论文的汇编权、翻译权、印刷版和电子版的复制权、网络传播权、发行权等权利在世界范围内无限期转让给《文教资料》杂志社。本刊在与国内外文献数据库或检索系统进行交流合作时,不再征询作者意见,并且不再支付稿酬。 九、特别欢迎用电子文档投稿,或邮寄编辑部,勿邮寄私人,以免延误稿件处理时间。
自动驾驶仿真测试关键技术「AI工程论」
作者:网站采编关键词:
摘要:关注:决策智能与机器学习,深耕AI脱水干货 来源 |线束世界 报道 |自动驾驶测试验证技术创新论坛 智能网联汽车(Intelligent and Connected Vehicle, ICV)是指搭载先进的车载传感器、控制器、执
关注:决策智能与机器学习,深耕AI脱水干货
 来源 |线束世界
来源 |线束世界
报道 |自动驾驶测试验证技术创新论坛
智能网联汽车(Intelligent and Connected Vehicle, ICV)是指搭载先进的车载传感器、控制器、执行器等装置,以车辆为主体和主要节点,并融合现代通信与网络技术,具备复杂环境感知、智能化决策、自动化控制功能,使车辆与外部节点间实现信息共享与控制协同,实现“零伤亡、零拥堵”,达到安全、有序、高效、节能行驶的下一代汽车。依照规划的路线图,在2020年,我国需掌握智能辅助驾驶总体技术和各项关键技术,到2025年,需掌握自动驾驶总体技术和各项关键技术。
智能网联汽车的关键技术主要包括环境感知技术、智能互联技术和数据驱动的智能应用技术,产业链涉及汽车、电子、通信、互联网、交通等多个领域,主要包括芯片厂商、传感器厂商、汽车电子/通信系统供应商、整车企业、平台开发和运营商以及内容提供商。
智能网联汽车包括智能化和网联化两个技术层面,相应的分级说明如下:
智能化分级:
1,DA(Driving Assistant),驾驶辅助
2,PA(Partial Autonomous),部分自动驾驶
3,CA(Conditional Autonomous),有条件自动驾驶
4,HA(Highly Autonomous),高度自动驾驶
5,FA(Fully Autonomous),完全自动驾驶
网联化分级:
1,网联辅助信息交互
2,网联协同感知
3,网联协同决策与控制
传统的汽车测试方法不能满足智能网联汽车的开发和认证需求,需要开发全新的测试评价方法体系以及支撑工具平台,智能网联汽车相关的标准和法规的建设,以及测试评价和系统验证方法的推广执行是推动智能网联汽车真正落地的重要组成部分。
 智能网联汽车面临近乎无限的运行场景,为厂商和测试机构提出了巨大的挑战。在面对实际道路上各种交通标识、道路参与者、路面标识、基础设施、道路类型、交通参与者和瞬息万变的交通行为,智能网联汽车需要有极强的环境变量感知能力,智能决策能力,车辆控制能力。
智能网联汽车面临近乎无限的运行场景,为厂商和测试机构提出了巨大的挑战。在面对实际道路上各种交通标识、道路参与者、路面标识、基础设施、道路类型、交通参与者和瞬息万变的交通行为,智能网联汽车需要有极强的环境变量感知能力,智能决策能力,车辆控制能力。
智能网联汽车的测试内容可以分为模型在环测试、软件在环测试、硬件在环测试、驾驶模拟器测试、车辆在环测试、封闭试验场测试和开放道路测试。下面简要介绍下智能网联汽车测试评价中比较重要的智能驾驶仿真测试,网联测试,以太网测试和关键零部件的测试。
智能驾驶仿真测试
智能驾驶仿真测试主要包括MiL(Model in Loop,验证控制算法模型是否准确实现了功能需求,相当于对算法的仿真),SiL(Software in Loop,验证代码实现的功能是否与模型一致,是对依照算法产生的代码进行仿真验证),HiL(Hardware in Loop,在整套硬件系统上验证代码实现的功能是否与需求定义一致,是进行整车仿真测试和实车路试前重要的验证环节)。仿真测试(关键部件/系统和整车)、封闭场地路试和实际场景路试需要紧密结合在一起,基于场景库来梳理云-路-端的闭环关系。智能网联汽车测试评价的重点在于软件层和系统集成这两个维度,“仿真”+“系统原型”,针对难点进行故障注入。把多种验证手段进行有效的组合才能有效的完成智能网联汽车的验证评价工作。
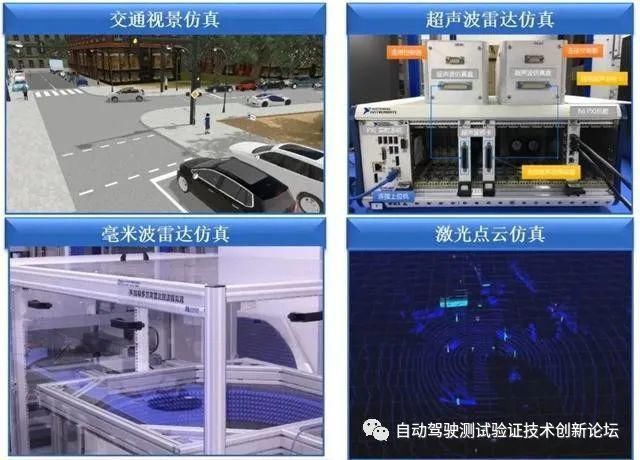
 以下简要介绍下HiL仿真测试的系统组成,整个系统由以下组成部分:
以下简要介绍下HiL仿真测试的系统组成,整个系统由以下组成部分:
· 视频注入模块
· 多方向多目标毫米波雷达模拟器
· 超声波雷达模拟器
· 激光点云仿真
· 交通流联合仿真
· 高级快速原型ARCP(Advanced Rapid Control Prototype)
· 驾驶模拟器及环幕
通过以上系统,可以实现智能驾驶全传感器融合的算法验证
 应用场景仿真软件,可以实现复杂道路交通环境仿真,提供多种雨、雪、雾等复杂天气模拟:
应用场景仿真软件,可以实现复杂道路交通环境仿真,提供多种雨、雪、雾等复杂天气模拟:
 毫米波回波模拟系统:
毫米波回波模拟系统:
 激光雷达点云仿真:
激光雷达点云仿真:
 六自由度驾驶模拟:
六自由度驾驶模拟:
 智能驾驶仿真测试的关键一环是搭建典型道路的场景库,从而浮现宏观及微观交通流,设置各类测试场景,以实现精细化测试:
智能驾驶仿真测试的关键一环是搭建典型道路的场景库,从而浮现宏观及微观交通流,设置各类测试场景,以实现精细化测试:

文章来源:《农业工程技术》 网址: http://www.gcjszzs.cn/zonghexinwen/2020/0909/983.html